Romibo Robot Project
Romibo is an evolving robot project, designed for motivation and therapy with
children who have special needs, and co-developed by our community of innovative
people like YOU. Together we are creating a low-cost robot for therapy,
education and fun! All of the physical, electrical and programmatic features of
the robot are open for alteration and everyone is welcome to contribute their
creative expertise. Together we are developing a better robot for everyone!
Join us! Learn to build robots, have fun, and help those with special needs.
The Project
The Romibo Robot project is developing a low-cost mobile robot with expressive
behavior which is suitable for both autism therapy and education. It is
currently a research project within the Robotics Institute run by Aubrey
Shick who works within the Quality of Life Technology Center.
The research agenda includes low-cost robot design, applications to therapies
for special needs children, and design research into creating large cooperative
user communities.
Aubrey Shick and Garth Zeglin are also in the
process of starting the company Origami Robotics LLC as a
means to bring the robot to a larger community.
We are currently looking for energetic undergraduates and graduate
students to help develop the project through independent study credits.
Technical Agenda
The Romibo project goals have motivated a specific technical agenda:
- develop a simple inexpensive mechanical design which can be built as a kit
- develop robust platform control algorithms and reactive behaviors
- design a programming API simple enough for a ten-year-old but expressive enough to create play
- create high-level teleoperation tools for non-technical users to guide play and emotional expression
- release the entire project as open-source, including electronics and mechanism
All of these will move the project toward the larger scientific goals. We would
like to understand the impact that a low-cost companion robot can have on
therapy both in the clinic and the home. We are also investigating the
educational outcome for DIY users who work with the robot as part of
contributing to the therapeutic behavior.
Project Status
The hardware project is advancing along all aspects in parallel with a wide
range of opportunities for contribution. The low-cost hardware enables a rapid
iteration process and parallel development. This will continue to expand until
we have a large user base experimenting with iterations of the platform and
contributing to a shared pool of experience.
Current Project Development Status:
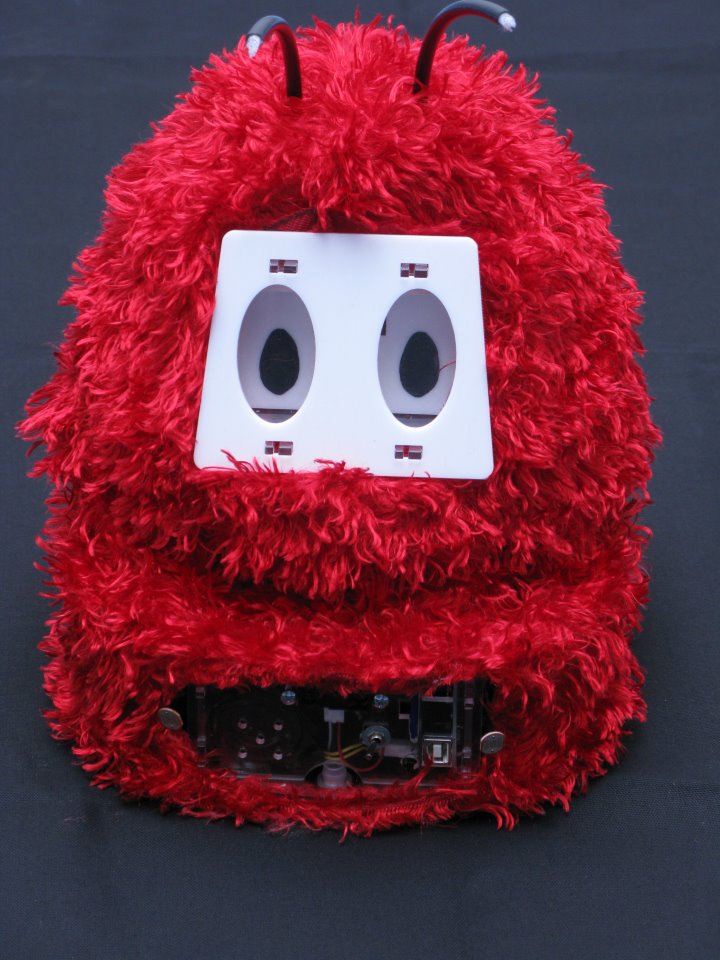
- designed a robot body and head assembled from laser-cut snap-fit flat parts
- designed a elastic neck suspension as a low-cost six-DOF neck joint
- designed an expressive eye mechanism with movable eyelid
- designed two iterations of electronics as a 'shield' board on top of an Arduino Mega
- incorporated audio voice playback from SD card storage
- incorporated motor, servo, LED outputs
- incorporated rangefinder, photocell, and touch switch inputs
- prototyped IR remote control input
- prototyped a microphone input for sound level estimation
- prototyped a character voice
- prototyped a washable fabric cover
- developed basic test behaviors (e.g. light-following, wandering) with simple emotional expression
Upcoming technical development includes:
- prototyping a robot network interface for remote control (WiFi and/or Bluetooth)
- prototyping a host-side user interface (first version is iOS-based)
- evaluate the assembly difficult and adjust the structural design for ease of assembly
- refine the servo drive of the neck and eyes
- redesign the touch switch mounting and add mechanical contact structure
- implement the user-accessible low-level robot control API
- design a high-level easy-to-use behavior API and implement it in a library
- develop sound input filter to detect child acoustic expression, e.g. shouting versus speech
- rewrite the FAT32 filesystem to support non-preemptive real-time execution
- create sound design and produce clips for the character voice
- upgrade the audio output to a class-D amplifier with hardware PWM modulation
- implement a non-blocking (interrupt-driven) IR remote control input algorithm
- redesign the electronics for power efficiency, noise immunity, and improved battery life
- redesign the electronics for motor current measurement
- redesign the PCB to incorporate the standard Arduino circuit to reduce space and cost
- develop motor model for dead reckoning position estimation
- evaluate the sensor suite for its effectiveness in supporting interactive behaviors
- redesign of all systems for manufacturability and low cost
The project also needs the expertise of designers and HCI researchers:
- ethnographic research
- in-clinic and at home behavioral studies
- user interaction design
- behavior design
- therapy protocols
- build-experience design
- form refinements
- marketing and business planning
- facilitation of crowdsourced software development
Skills Needed
This project involves developing a complete robot and so requires many areas of
engineering expertise. We are looking for students comfortable working with
overlapping requirements who have one or more of the following skills:
- embedded programming (Arduino-based)
- API design and library development
- robot behavior programming
- digital circuit design
- analog circuit design
- troubleshooting complex systems
- design for manufacturing and cost reduction
- design for assembly
- PCB design
- parts selection and procurement
Why you should help
This is an opportunity to become involved with a highly motivated team of
professional roboticists, researchers and students on a project which can
significantly benefit children through both special-needs therapy and education.
On the technical side:
- This is a chance to learn minimalist design practice. The robot resources
are limited, so every solution must be efficient. This creative constraint
focuses creativity and leads to novel methods.
- This is a chance to contribute to an open-source design process which will
ultimately involve a large user community. Open-source transparency promote
clean design and well-motivated decisions, since all aspects may be examined
and questioned.
- The robot is simplified enough that every feature has potential for design
innovation and iteration. This encourages cross-disciplinary development,
since all subsystems interrelate, but all are available for modification and
redesign.
- There is an opportunity to create a novel community interaction experience to
enable crowdsourced co-development of robot behaviors.
Last modified: 2012/01/16 23:07:08
Romibo Robot Project, Robotics Institute, Carnegie Mellon University.